در
یک سیتم متمرکز ، همه حسگرها و تحریک کننده ها مستقیما ً به سیستم مونیتور
مرکزی متصل می شوند. در یک سیستم بزرگ که تعداد ورودی و خروجی ها به
هزاران می رسد واین تعداد بسیار فراتر ظرفیت سخت افزار کامپیوتر است ، هر
دوره اخذ اطلاعات از ورودی ها بیشتر از زمان محدود تعریف شده توسط سیستم
طول خواهد کشید. سایر اشکالات سیستم متمرکز عبارتند از : عدم انعطاف پذیری ،
عدم استفاده از تکنیک های به روز[1]
و تکنولوژی های جدید وهزینه نصب زیاد ومشکلات مربوط به توسعه سیستم . به
همین دلائل سعی می شود که وظایف در سیستم توزیع شوند . در سیستم توزیع شده
تصمیم گیریها به صورت محلی صورت می گیرد و چندین نقطه کنترلی که وجود دارد
که به طور مستقل از هم عمل می کنند اما به یکدیگر ارتباط دارند . در یک
سیستم توزیع شده ، دستگاههای لایه پائینی هوشمند هستند و کاربر مطابق نیاز
خودش قادر به برنامه ریزی این ابزار می باشد. این دستگاههای هوشمند باید
قادر باشند از طریق شبکه با سایرین ارتباط برقرار کنند وبه ابزار ذخیره
سازی اطلاعات دسترسی مستقیم داشته باشند.
در سال 1980، شرکت Honeywell برای نخستین بار ، امکان سوار کردن سیگنالهای دیجیتال روی حلقه جریان 4 تا 20 میلی آمپر را برای برخی از Fild device های تولیدی خود فراهم کرد. این سرآغاز ایده ساختن فیلد باس شد. هرFild deviceبرای
ارتباطش از قواعد خاص خودش پیروی می کند که به سازنده اش بستگی دارد.
اداره چنین دستگاههایی روز به روز مشکل تر و پیچیده تر می شود. به منظور حل
این مسأله ، از شبکه های کامپیوتری الهام گرفته شده است. در این روش یک یا
چند خط سریال، همه Fild device را به هم وصل می کند.(شکل 1)
شکل 2-1- مقایسه باسیستمهای قدیمی
یک فیلد باس از دو جزء اصلی تشکیل می شود : Fild device
ها که گره خوانده می شوند وبستری که شبکه داده ای را تشکیل می دهد. به کمک
فیلد باس می توان دستگاههای صنعتی سطح پایین نظیر حسگرها ، تحریک کننده
ها، ابزار I/O و کنترل کننده ها مثل PLC
و کامپیو ترها را به روشی ساده و یکسان به هم متصل نمود . با استفاده از
ابزار اندازه گیری سنتی 4 تا 20 میلی آمپر، فقط ارسال مقادیر یک متغیر از
طریق جفت سیم میسربود. به کمک تکنولوژی فیلدباس ، تبادل اطلاعات در فرم
دیجیتالی و دو طرفه صورت می گیرد. بنابراین علاوه بر مقادیر متغیرها، می
توان اطلاعات دیگری دیگری راجع به وضعیت Fild device
بدست آورد وعمل پیکربندی ابزار را نیز از طریق شبکه انجام داد . بدین
ترتیب علاوه بر کنترل دستگاهها ، می توان آنها را اداره کرد. مثلا ً مطلع
شد که یک ترانسمیتر حرارتی آخرین بار چه موقع کالیبره شده است.
به کمک این اطلاعات وبا استفاده از قدرت پردازشی Fild device ، می توان عملیات کنترلی پیچیده تری را به صورت محلی انجام داد.
فیلد
باس علاوه بر امکان انتقال سیگنا لها بین ابزار دقیق و اتاق کنترل، امکان
انتقال تغذیه مورد نیاز تجهیزات را تنها توسط یک جفت سیم میسر می سازد. این
موضوع سبب کاهش هزینه های کابل کشی ، پانل های نگه دارنده کابل ، اتصالات ،
کابینتهای مارشالینگ و مخارج نیروی انسانی در رابطه با نصب ، پیاده سازی و
نگهداری می شود. همچنین نیاز به تعویض پانلها و قطعات دیگر به دلیل
فرسودگی و خوردگی ، کاهش می یابد. سیستم انعطاف پذیر می شود و به راحتی می
توان از تکنولوژیهای جدید استفاده کرد. هر گره را می توان به منظور سرویس و
تعمیر از شبکه خارج کرد، بدون اینکه لطمه ای به عملکرد سایرین وارد شود.
با استفاده از ابزار واسط مبدل سیگنالهای فشا(3 to 15 ps
) و جریان ( 4تا 20 میلی آمپر ) به سیگنالهای فیلد باس ، امکان مدرنیزه
کردن با تکنولوژی فیلد باس وحفظ قطعات سنتی میسر است. به کمک این ابزار
واسط صرفه جویی های قابل ملاحظه ای در مدرنیزه کردن مجموعه حاصل می
شود.(شکل 2 )
شکل 2-2- اتصال تجهیزات سنتی به فیلد باس
گفتیم
که برای ساخت فیلد باس از شبکه های کامپیوتری محلی ایده گرفته شده است.
اما تفاوتهایی هم بین این دو وجود دارد، از جمله اینکه نرخ انتقال اطلاعات
چندان زیاد نیست لیکن داده ها باید در فواصل زمانی قابل پیش بینی ارسال
شوند.
هم چنین به منظور دستیابی به کارایی بالاتر تمام لایه های هفت گانه پروتکل OSI[2] پیاده سازی نمی شوند بلکه تنها سه لایه از این پشته، یعنی لایه فیزیکی ، لایه data link ولایه کاربرد پیاده سازی می شوند.
همانند
شبکه های کامپیوتری ، چون چندین گره از یک بستر ارتباطی استفاده می کنند،
تصادم ایجاد می شود ودر نتیجه زمان پاسخ افزایش می یابد. پروتکل های مختلفی
برای اداره دسترسی به بستر ارتباطی و تصادم تعریف شده که از میان آنها
روشهای[3] CSMA/CD وToken passing برای کاربردهای صنعتی مناسبترند. علاوه بر تعریف استاندارد بین المللی برای فیلد باس [4]، سازندگان متعددی محصولاتی تهیه کرده اند که معمولا با یکدیگر ساز گار نیستند از جمله :
BACNet, FIP/WEIP, BitBUS, P-NET, ProfiBUS, LonWorks, CANbus
Seriplex, MODBUS, Mester Fieldbus, Interbus, ISP, HART, DeviceNet
در سال 1993 استاندارد بین المللی Foundation Fieldbus نتیجه تلاش مشترک ISP و WFIP تعریف شد هدف از تعریف استاندارد برای فیلد باس به شرح زیر است :
1- ابزار آلات تئلید شده توسط سازنده های مختلف مانند حالت ند، در عین حال از امکانات شبکه دیجیتال دو طرفه استفاده می شود.
2- این شبکه ها باید قابل اتصال به سیستمهای اتوماسیون تولید وپردازش داده تجاری نظیر MAP و TOP باشند.
Field device های امروزی را می توان به سه گروه تقسیم کرد:
1- ورودی – خروجی های آنالوگ و دیجیتال
2- دستگاه های ترکیبی آنالوگ و دیجیتال
3- ابزار کاملا دیجیتال
دستگاه
های نوع اول از طریق حلقه های جریان آنالوگ 4 تا 20 میلی آمپر به سیستم
ورودی – خروجی متصل می شوند این اتصالات کاملا نقطه به نقطه هستند و هر
دستگاه جدا گانه، به کنترل کننده های میزبان وصل می شود. گروه دوم قابل
استفاده در سیستم های ارتباطی آنالوگ و دیجیتال هستند. به عنوان مثال در
این سیستم ها داده ها یدیجیتالی روی سیگنالهای 4 تا 20 میلی آمپر آنالوگ
سوار می شوند. سیگنال دیجیتال طوری ساخته می شود که میانگین مقدار آن صفر
باشد و خواندن مقادیر جریان آنالوگ را تحت تأثیر قرار ندهد. دستگاههای گروه
سوم از طریق پورتهای RS232,RS485 به هم وصل می
شوند ونیاز به درایورهای نرم افزاری دارند. فیلد باس، پروتکل ارتباطی تمام
دیجیتال با بازدهی بالاست که جایگزین هر سه سیستم بالا می شود. سیستم های
مبتنی بر فیلد باس تنها از محصولات فیلد باس استفاده نمی کنند بلکه تجهیزات
قدیمی ورودی – خروجی انالوگ قابل اتصال به فیلد باس می باشند.( شکل 3)
در ادامه به بررسی استانداردFF وپروتکل سه لایه آن واستانداردهای متداول خاص سازندگان می پردازیم.
شکل 2-3- اتصال سه نوع Field device به فیلد باس
2-3-1- آشنایی با برخی از فیلد باسها
2-3-1-1- تکنولوژی (ff) [10],[11] Foundation Field bus
خاصیت مهم و سودمند FF ، قابلیت همکاری [5]آن
است. به این معنا که دشتگاههای مختلف از سازندگان متفاوت قادرند از طریق
آن، در یک سیستم کار کنند. سازنده ای که می خواهد چنین دستگاهی را تولید
کند باید با استاندارد های FF توافق کند و گواهی
لازم را دریافت نماید. این مسأله کاربر را قادر می سازد که به سازنده خاصی
محدود نباشد و خود باعث رقابت در ساخت دستگاهها وپایین آمدن قیمتها می شود.
پشته پروتکل FF شامل سه بخش است:
1- لایه فیزیکی
2- لایه ارتباطات
3- لایه کاربرد
به منظور مدل کردن این اجزاء ، از مدل OSI استفاده شده است. لایه فیزیکی همان لایه یک OSI است. و[6]FMS ( لایه تعریف پیغامهای فیلد باس ) متناظر با لایه هفتم OSI می باشد. زیر لایه FAS[7] ارتباط بین FMS وDLL[8] را فراهم می کند ( شکل 1-4 ). هر لایه header مربوط به خودش را به داده های کاربر اضافه می کند تا پیغام به لایه فیزیکی برسد. طول header بر حسب بایت در شکل 1-4 مشخص شده است.
لایه فیزیکی مطابق استانداردهای ISA و IEC
ساخته شده است. لایه فیزیکی پیغام را از پشته پروتکلی در یافت کرده آنرا
به سیگنالهای قابل ارسال روی بستر ارتباطی فیلد باس تبدیل می کند. عملیات
تبدیل شامل اضافه و حذف کردن مقدمه، محدود کننده ابتدایی و محدود کننده
انتهایی می باشد. سیگنالها به روش Manchester- Biphase-L کد می شوند . بنابراین اطلاعات زمانی لازم برای همگام سازی [9]در خود داده ها پنهان می باشد. شکل های 5و6 نمایشگر نحوه کد کردن اطلاعات و الگوهای خاص شروع و خاتمه پیغام هستند. گیرنده از سیگنال Preamble برای همگام سازی ساعت خودش با اطلاعات ارسالی استفاده می کند.
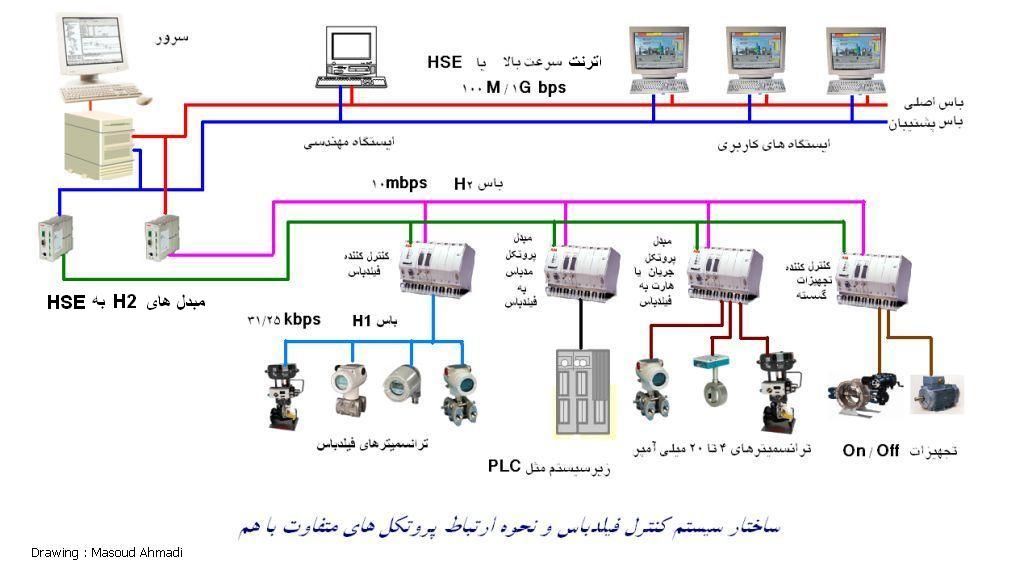
2-4- پشته پروتکلی Foundation Fieldbus
لایه فیزیکی از دو نوع باس ، پشتیبانی می کند: فیلد باس HI وفیلد باس H2. از فیلد باس HI برای کاربردهای کنترل دما، سطح و جریان استفاده می شود. دستگاهها را می توان مستقیما ً از طریق فیلد باس تغذیه نمود. سیگنالیک HI به این صورت است که بخش ارسال داده ها، جریان 10mA با سرعت 25/31 kbit/s تولید می کند و با توجه به اینکه مقاومت ختم کننده [10]، 50 اهم است ولتاژی برابر یک ولت ( peak to peak) روی خط می افتد. این سیگنال روی جریان DC مستقیم منبع تغذیه سوار می شود. ولتاژ تغذیه بین 9 تا 32 ولت DC
متغیر است. طول فیلد باس به سرعت انتقال داده ها، اندازه سیم و توان باس
بستگی دارد. مسیر اصلی در صورتی که از کابل زوج سیم تابیده با محافظ
استفاده شود، نباید از 1900 تجاوز کند. فیلد باس H2
برای کنترل پیشرفته فرآیند، ورودی – خروجی های راه دور و کاربرد های
اتوماسیون سرعت بالای کارخانه بکار می رود. گر چه استاندارد لایه فیزیکی
اجازه می دهد توان از طریق فیلد باس توزیع شود، اما در بیشتر کاربردها
دستگاههای متصل به H2، منبع تغذیه جداگانه دارند یا از طریق کابل دیگری، توان دریافت می کنند. مشخصات سیگنالیک H2 به این ترتیب است که دستگاه ارسال داده، جریان 60mA با
سرعت 2/5 مگابیت در ثانیه تولید می کند. با توجه مقاومت 75 ختم کننده ها،
ولتاژ97 روی خط القاء می شود. اگر قرار باشد توان از طریق باس ارسال شود، سیگنالهی فیلد باس روی سیگنال توان 16Khz AC
مدوله می شوند. دستگاه های فیلد باس، همگی به مسیر اصلی متصل می شوند وبه
کمک اتصال دهنده خاصی از طریق کوپل القایی سیگنالهای داده و توان را در
یافت می کنند. در این حالت نیازی به شکستن مسیر اصلی باس به منظور اتصال
دستگاهها نیست.
به دلیل بالا بودن سرعت انتقال داده ها، تنها از توپولوژی باس پشتیبانی می شود و به علت پدیده انعکاس ، نمی توان مانند H1 انشعابها را به مسیراصلی متصل نمود. تعداد کل وسایلی که می توان به H2 وصل نمود بستگی به مصرف توان ، نوع کابل و استفاده از تکرار کننده ها دارد. به منظور اتصال فیلد باسهای منفرد H1 وH2 وساخت شبکه بزرگتر از پل ( bridge ) استفاده می شود. وظیفه لایه LDD کنترل دسترسی به رسانه ارتباطی با استفاده از زمانبند مرکزی بنام[11] LAS می باشد. این پروتکل از ترکیب استانداردهای ISA و IEC برای لایه DLL بوجود آمده است.
دستگاههای متصل به این باس را می توان به سه دسته تقسیم کرد:
1- دستگاههایی که قادر نیستند نقش LAS را ایفا کنند.
2- دستگاههای Link Master که می توانند LAS هم باشند.
3- پلهایی که به منظور اتصال فیلد باسهای منفرد بکار می روند.
LAS
LAS
یک لیست حاوی زمانهای ارسال تمام بافرهای داده موجود در دستگاههایی که به
صورت پریودیک داده ارسال می کنند، نگهداری می کند. هر زمان که نوبت یک
دستگاه فرا میرسد ، LAS یک پیغام [12]CD به آن می فرستد. پس از دریافت CD
، دستگاه مزبور داده های موجود در بافرش را روی باس منتشر می کند.
دستگاههایی که به عنوان مشترک دریافت پیغام پیکر بندی شده اند، این داده ها
را دریافت می کنند. این روش به منظور ارسال منظم و چرخشی داده ها ی حلقه
کنترلی بین دستگاههای متصل به فیلد باس طراحی شده است.
تمام دستگاههای روی Fieldbus فرصت این را دارند که پیغامهای خارج از نوبت و پیش بینی نشده را روی باس بفرستند. LAS
با ارسال نشانه به یک دستگاه ، به آن اجازه استفاده از باس را می دهد.
وقتی دستگاه نشانه را می گیرد، تا زمانی که ارسال پیغام شود یا مهلت
نگهداری نشانه تمام شود، می تواند به ارسال پیام ادامه دهد. این پیغام به
یک یا چندین مقصد ارسال می شود. کل عملیات LAS به پنج گروه تقسیم می شود:
1- زمانبندی پیغام CD : همانگونه که قبلا ذکر شد ، کل عملیات LAS کنترل دستی به باس است. این وظیفه بالاترین الویت را داراست وسایر عملیات در فواصل ارسال زمانبندی شده، انجام می شوند.
2- نگهداری لیست اعضای فعال : این لیست حاوی آدرس اعضایی است که به Token دریافتی ، پاسخ مثبت می دهند. هر لحظه ممکن است دستگاههای جدیدی به باس وصل شود. LAS به صورت پریودیک پیغامهای[13] PN را به آدرسهایی می فرستد که در لیستش موجود نیستند. اگر دستگاهی با آدرس مذ کور حاضر باشد، به PN پاسخ می دهد و نامش به لیست موجود در LAS اضافه می شود.
لازم است LAS ، پس از ارسال Token به همه اعضای فعال ، حداقل یک پیغام PN به یک آدرس ارسال کند. دستگاهها تا زمانی که به پیغامهای[14] PT پاسخ صحیح می دهند در لیست باقی می مانند. اگر پس از سه مرتبه تلاش ، دستگاهی بدون استفاده از Token
، آنرا برگرداند، از لیست حذف می شود. پس از انجام هر نوع تغییری در جدول،
محتویات آن را برای همه دستگاههای موجود روی باس ، منتشر می شود.
3- همگام سازی در لایه DLL : LAS بصورت پریودیک پیغام اعلام زمان سراسری را روی شبکه منتشر می کند تا زمان تمام دستگاهها در لایه DLL،
یکسان باقی بماند. این کار لازم است، زیرا ارتباطات زمان بندی شده بلوک
های عملیاتی در لایه کاربرد ، مبتنی بر اطلاعات استخراج شده از این پیغامها
هستند.
4- ارسال Token : هر دستگاه با دریافت Token ، اجازه دارد پیغامهای زمانبندی نشده ای را ارسال کند.
5- افزونگی LAS: هر فیلد باس، ممکن است چندین Link Master داشته باشد که با از کار افتادن LAS جاری، جایگزین آن بشوند یعنی فیلد باس به صورت فعال در زمان رخ دادن خطا [15] طراحی شده است.
لایه FMS
به برنامه های کاربردی اجازه می دهد که به یکدیگر از طریق فیلد باس و با
استفاده از تعدادی پیغام با فرمت استاندارد، ارتباط داشته باشند. FMS، سرویس های ارتباطی ، فرمت پیغام ها و رفتار پروتکل برای ساخت پیغامهای کاربر را تعریف می کند.
پیغامهای FMS را می توان بر حسب وظایفشان گروه بندی کرد:
1- پیغام هایی که مسئول برقراری و قطع ارتباط ورد کردن پیامها هستند.
2- سرویسهای دسترسی به متغیرها از قبیل خواندن ، نوشتن، گزارش و پاک کردن اطلاعات.
3- سرویسهایی که به برنامه کاربر اجازه می دهند که رخدادها را گزارش دهد و آنها را پردازش نماید.
4- سرویسهای down load , uphoad
5- سرویسهای اجرای برنامه از راه دور
برای جزئیات بیشتر ، به مرجع [10] مراجعه کنید.
آنالوگ (AO)، کنترل کننده PD و PID وتناسبی تعریف شده اند. در FF-892 ،19 تابع استاندارد دیگر نیز تعریف شده است . به عنوان مثال، یک حس کننده دما، تنها شامل بلوک عملیاتی AI است. یک شیر کنترل ، شامل بلوک عملیاتی PID وبلوک AD می باشد. بنابراین یک حلقه کنترلی ساده با این بلوکهای پایه ای ساخته می شود.
بلوکهای Transducer
بلوکهای عملیاتی را از توابع ورودی – خروجی محلی مورد نیاز برای خواندن
حسگرها و صدور دستورات خروجی، جدا می کند. این بلوکها حاوی اطلاعاتی در
مورد زمان Calibration ونوع حسگرها می باشند. معمولا به ازای هر بلوک عملیاتی ورودی – خروجی یک بلوک Transducer
لازم است. پس از طراحی سیستم وانتخاب ابزار آلات، زمان پیکر بندی سیستم
کنترلی به کمک اتصال ورودیهاو خروجیهای بلوکهای عملیاتی به یکدیگر طبق
استراتژی کنترلی مورد نظر ، فرا می رسد.( شکل 8) این کار با استفاده از
اشیاء گرافیکی موجود در نرم افزار پیکر بندی صورت می گیرد بدون اینکه نیاز
به برقراری اتصالات فیزیکی در محل باشد. پس از مشخص شدن اتصالات بلوکهای
عملیاتی ، نام دستگاهها، برچسبها ونرخ اجرای حلقه های کنترلی، نرم افزار
پیکربندی هر دستگاه را تولید می کنند. پس از اینکه همه دستگاهها، اطلاعات
را در یافت کردند، سیستم آماده کار می شود.
علیرغم
تعریف استاندارد برای فیلد باس، این استاندارد هنوز جهانی نشده وشرکتهای
تولید کننده ای وجود دارند که ادعا می کنند با رعایت استانداردهای خودشان
به باز دهی بهتری دست می یابند. محصولات این شرکتها مطابق خصوصیات زیر از
هم متمایز می شوند:
1. مشخصات
فیزیکی نظیر توپولوژی شبکه ، بستر فیزیکی ارتباط، ماکزیمم تعداد گره های
متصل به گذرگاه و ماکزیمم طول مسیر با تکرار کننده وبدون تکرار کننده.
2. مشخصات کارایی نظیر مدت زمان هر سیکل بازرسی ورودی – خروجی ها، ومدت زمان ارسال هر بلوک داده ای.
3. مکانیزم
انتقال نظیر متدهای ارتباط، خصوصیات ارسال ، سایز داده های انتقالی، متد
دستیابی به بستر ارتباطی مشترک و روشهای چک کردن خطا در پیغامها.
شکل 2-8- پیکر بندی سیستم از طریق اتصال بلوکها
سهولت
نصب، پذیرش جهانی و امکان انتقال توان از طریق فیل باس از دیگر مشخصات
محصولات مختلف هستند اما به طور قطع نمی توان یکی از این تکنولوژیها را به
عنوان تکنولوژی برتر معرفی کرد و بسته به کاربرد ، باید نقاط قوت وضعف هر
کدام را سنجید وابزار مناسب را انتخاب نمود. در ادامه به معرفی نمونه هایی
از این دست می پردازیم.
2-3-1-2- AS-i [24],[25] Actuator sensor-Interface
کار
بردهای معمول آن در ماشینهای اسمبلی و بسته بندی ، سیم کشی تک کابلی
بلوکهای حسگر با چند ورودی، حسگرهای هوشمند، شیرهای پنوماتیکی، سوئیچ ها
و.آشکار کننده ها می باشد. مزایای آن، سادگی بسیار زیاد ، هزینه پایین و
مقبولیت گسترده است. همچنین دارای سرعت بالا می باشد و می توان توان مورد
نیاز Fielddevice را از طریق باس انتقال داد.
نقاط ضعف آن عبارتند از: مناسب نبودن برای اتصال به I/O های آنالوگ و اندازه محدود شبکه.
ASI برای استفاده در سیستمهای کوچک با I/O گسسته طراحی شده و تقریبا ً ساده ترین فیلد باس موجود است. برای پیکر بندی آن تنها لازم است آدرس هر گروه مشخص شود ورودی – خروجی های متناسب به آن نسبت داده شوند. کابل سیگنال قادر است توان 30 ولت DC را با جریان کم ، برای تغذیه ورودیها ، حمل کند وتوان مورد نیاز خروجی ها از طریق کابل جداگانه ای حمل می شود.
با وجود عدم استفاده از پوشش محافظ در مقابل اغتشاشات RFI,EMI
مصون است ، به این دلیل که سیگنالهای دیجیتال روی ک مصون است ، به این
دلیل که سیگنالهای دیجیتال روی ک مصون است ، به این دلیل که سیگنالهای
دیجیتال روی کابل بصورت سیگنال سینوسی کد می شوند که پهنای باند خیلی
باریکی دارد. مکانیزم فیلترینگ در طول شبکه توزیع شده وسیگنالهای اغتشاش را
پس می زند. سیگنالهای آنالوگ نیز می توانند روی خط، ارسال شوند، اما هر
گره تنها می تواند یک دستگاه آنالوگ را پشتیبانی کند.
زمان SCAN در ASI قطعی است. یعنی با اطمینان مشخص کرد که فاصله زمانی بین تغییر وضعیت تا گزارش آن چقدر است. برای محاسبه زمان SCAN باید تعداد گره ها شامل Slave,Master را در 150 میکرو ثانیه ضرب کرد.
2-3-1-3- [31] Interbus
کاربردهای
متداول آن در ماشینهای اسمبلی، جوشکاری و کنترل مواد می باشد. همچنین برای
سیم بندی تک کابلی حسگر چند ورودی، شیرهای پنوماتیکی ، بار کد خوانها،
درایوها و واسط های کاربر استفاده می شود. از مزایای آن آدرس دهی اتوماتیک
بهگره هاست که شروع به کار سیستم را آسان و سریع می کند. توانایی تشخیص
خطای آن بسیار پیشرفته است. پیغام های آن Overhead کمی دارند و زمان پاسخ سریع و استفاده مؤثر از پهنای باند و انتقال توان از خصوصیات دیگر آن است.
اشکال آن این است که از کار افتادن یک اتصال، کل شبکه را از کار می اندازد و توانایی انتقال مقادیر خیلی زیاد داده را ندارد.
این باس از نظر فیزیکی شبیه یک شبکه مبتنی بر Line-and-drop به نظر می رسد اما در واقع یک رینگ سریال است و هر Slave،
دو اتصال دارد و از طریق یکی داده را رد می کند و از طریق دیگری داده ها
را به بعدی منتقل می کند. اطلاعات آدرس دهی در این پروتکل وجود ندارد و
داده ها به روش چرخشی روی شبکه قرار می گیرند وMaster
با توجه به مکان هر گره در حلقه می تواند تشخیص دهد گره در حال خواندن یا
نوشتن است. این مسأله سربار بسته های داده ای را می نیمم می کند. بنابراین
تعداد کمی از باسهای موجود سریعتر از InterBUS هستند.
InterBUS می تواند به آسانی I/O های آنالوگ و دیجیتال را اداره کند و داده ها می توانند بصورت بلوکی ارسال شوند. به کمک ماجولهایی به نام COMM
که بوردهایی به اندازه کارت اعتباری هستند ونصب آنها در کنترل کننده ها،
واسط کاربر، درایو، بار کد خوان، پردازنده سیگنال و هر دستگاه دیگری ، می
توان آنها را به فیلد باس متصل کرد.
2-3-1-4- [21],[22] CAN Open
کاربردهای
متداول آن در سیستمهای کنترل حرکت، ماشین های اسمبلی ، جوشکاری و کنترل
مواد، اتصال بلوکهای حسگر ، حسگرهای هوشمند، شیرهای پنوماتیک ، بار کد خوان
، واسط کاربر ودرایو می باشد.
CAN Open در واقع پروتکل لایه کاربرد است و بر مبنای پروتکل CAN که لایه های 1و2 را تعریف می کند نوشته شده است و مزایای آن عبارتند از:
1- از سایر شبکه های مبتنی بر پروتکل CAN برای کنترل حرکت سرعت بالا و حلقه های فیلد بک مناسبتر است.
[1] On-line
[2] Open System Interface
[3] Carrier Sense Multiple Access/Collision Detection
[4] Foundation Fieldbus Standard
[5] interoperabilily
[6] Fieldbus Message Specification
[7] Fieldbus Accsess Sublayer
[8] Data Link Layer
[9] Terminator
[10] Terminator
[11] Link Access Sublayer
[12] Compel Data
[13] Probe Node

همه چی عالیه عین چی!!!!!! عین چی.
فقط چی میشد عکسهاهم نشون داده میشدمطلب بدون عکس فهمیدنش یه خورده مشکله!مگه نه!!!!